Il DOBOT Atom ha attirato l'attenzione perché combina movimento umanoide, visione binoculare, rilevamento della profondità, percezione LiDAR, mani abili, intelligenza artificiale edge e teleoperazione all'interno di una singola piattaforma robotica. Dietro queste capacità c'è un'architettura elettronica integrata che supporta il rilevamento, l'elaborazione, il movimento, la gestione dell'energia e la comunicazione. Questo articolo esplora i sottosistemi elettronici comunemente associati ai robot umanoidi in stile DOBOT Atom, inclusi sensori, sistemi di visione, controllo del motore BLDC, giunti robotici, feedback degli encoder, gestione della batteria, isolamento dei segnali e tecnologie di comunicazione wireless che abilitano un'operazione robotica coordinata e intelligente.
Catalogo

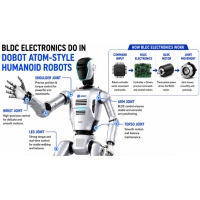
Figura 1. Elettronica dei Robot Umanoidi in Stile DOBOT Atom
I robot umanoidi come il DOBOT Atom utilizzano elettroniche avanzate per robot umanoidi e un'architettura strutturata dell'elettronica dei robot per supportare un'operazione efficiente e coordinata. Il sistema elettronico può includere sensori, controller embedded, unità di attuazione, moduli di comunicazione e componenti di gestione dell'energia all'interno di un framework unificato. Sensori come fotocamere, LiDAR, unità di misurazione inerziale e sensori di forza acquisiscono dati ambientali e relativi al movimento, mentre gli attuatori generano movimento meccanico controllato. L'architettura elettronica del robot stabilisce la struttura di comunicazione e controllo tra i moduli di rilevamento, elaborazione e attuazione. Questa distinzione è importante perché un'operazione sincronizzata, il feedback in tempo reale e il controllo preciso sono necessari per una locomozione stabile e un'esecuzione affidabile dei compiti.
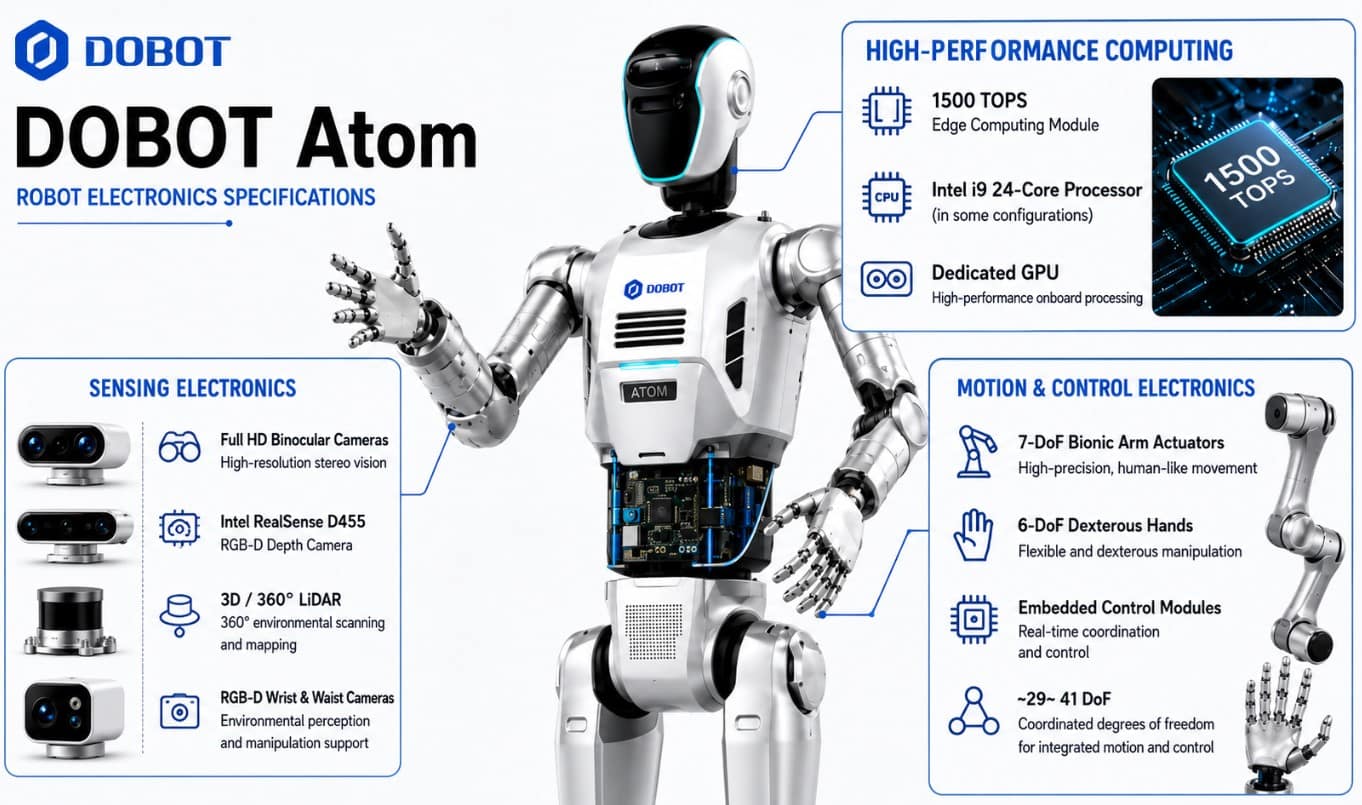
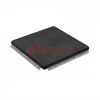
Figura 2. Specifiche Pubbliche del DOBOT Atom
Le specifiche pubbliche della serie DOBOT Atom rivelano diversi sottosistemi elettronici e capacità a livello di piattaforma che aiutano a spiegare la sua architettura elettronica per robot umani. La piattaforma integra un modulo di edge computing da 1500 TOPS, abbinato in alcune configurazioni a un processore Intel i9 a 24 core e a una GPU dedicata per l'elaborazione ad alte prestazioni a bordo. Questi sottosistemi di elaborazione e rilevamento formano collettivamente l'elettronica DOBOT Atom, supportando il calcolo AI a bordo, la percezione e il controllo robotico coordinato. La sua elettronica di rilevamento include telecamere binoculari Full HD, una telecamera di profondità RGB-D Intel RealSense D455, LiDAR 3D/360° e ulteriori telecamere RGB-D per il supporto alla percezione e manipolazione ambientale. L'elettronica di movimento e controllo consiste in attuatori di braccio bionico a 7 gradi di libertà, mani destre a 6 gradi di libertà e moduli di controllo integrati che coordinano circa 29–41 gradi di libertà, formando un'architettura elettronica robotica integrata per movimenti precisi e controllo del sistema.
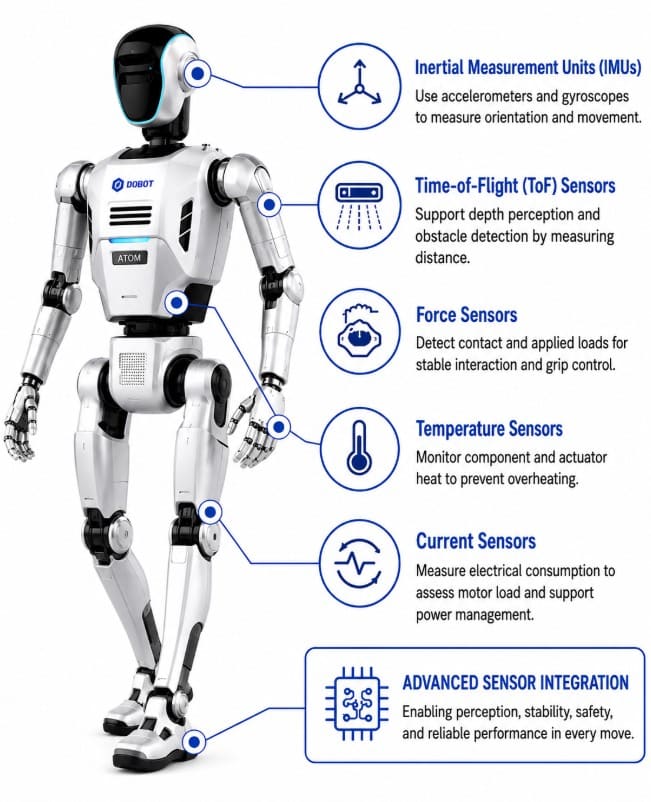
Figura 3. Elettronica dei Sensori nei Robot Umani
L'elettronica dei sensori fornisce feedback in tempo reale per il controllo del movimento, l'equilibrio e il monitoraggio del sistema nei robot umani. Nei robot umani in stile DOBOT Atom, l'elettronica dei sensori può includere IMU, moduli di rilevamento della distanza, sensori di forza, sensori di temperatura e circuiti di monitoraggio della corrente. I materiali pubblici di DOBOT sottolineano camere di profondità, visione binoculare, LiDAR e attuazione robotica, mentre l'architettura dei sensori più ampia di sistemi umani simili dipende spesso da segnali di monitoraggio del movimento, della distanza, della forza e elettrici. Per una spiegazione più approfondita di IMU, sensori ToF, sensori di forza, condizionamento dei segnali, interfacce dei sensori e fusione dei sensori, leggi la nostra guida dettagliata su elettronica dei sensori nei robot umani.
Gli IMU utilizzano accelerometri e giroscopi per misurare l'orientamento e il movimento. I sensori Time-of-Flight (ToF) supportano la percezione della profondità e la rilevazione degli ostacoli misurando la distanza. I sensori di forza rilevano il contatto e il carico applicato per un'interazione stabile e il controllo della presa. I sensori di temperatura monitorano il calore dei componenti e degli attuatori per prevenire il surriscaldamento, mentre i sensori di corrente misurano il consumo elettrico per valutare il carico del motore e supportare la gestione dell'energia. Insieme, questi sensori migliorano la stabilità, la sicurezza e l'affidabilità del funzionamento del robot.
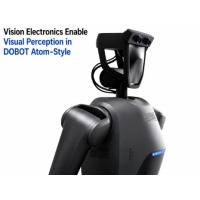
Figura 4. Elettronica Visione
L'elettronica di visione nei robot umani è essenziale per la percezione ambientale, la navigazione e l'interazione con gli oggetti. Il sistema di visione Dobot Atom può integrare imaging RGB, tecnologie di rilevamento della profondità e moduli di telecamera multipli per supportare la consapevolezza spaziale e i compiti di percezione robotica. Sistemi come l'Intel RealSense D455 integrano l'imaging RGB con la tecnologia di rilevamento della profondità per fornire misurazioni spaziali accurate e stime di distanza. Le telecamere binoculari Full HD utilizzano doppi sensori di immagine sincronizzati per imitare la visione stereoscopica umana, abilitando la percezione della profondità e la localizzazione degli oggetti attraverso l'analisi della disparità dell'immagine. Inoltre, le telecamere RGB-D acquisiscono simultaneamente informazioni sul colore e sulla profondità, migliorando la comprensione della scena e la mappatura ambientale. Per vedere come funzionano le telecamere RGB-D, la visione binoculare, i sensori di immagine, i circuiti ISP, i processori di visione AI e le interfacce delle telecamere all'interno di questo strato di visione, leggi la nostra guida su elettronica di visione nei robot umani in stile DOBOT Atom.
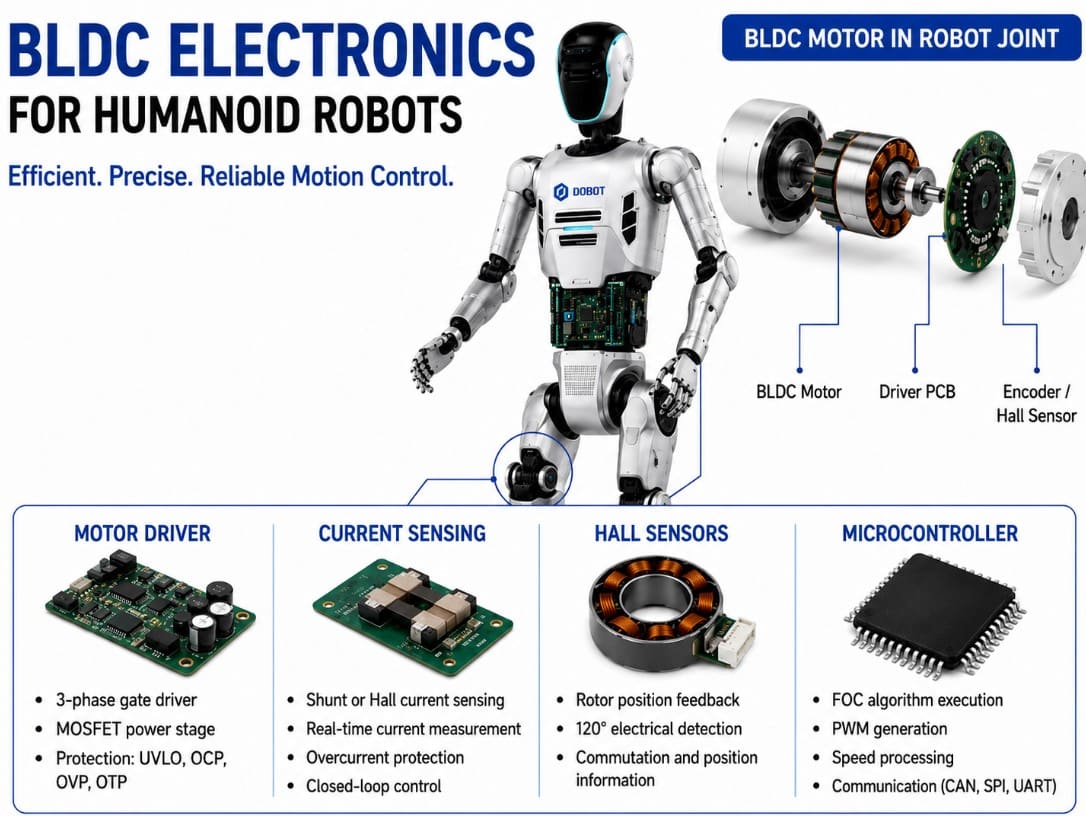
Figura 5. Elettronica BLDC
L'elettronica BLDC è importante nei robot umani perché fornisce un controllo efficiente e preciso dei motori DC senza spazzole utilizzati nelle articolazioni e nei sistemi di movimento robotici. Il controllo del motore BLDC nei robot umani integra comunemente driver per motori, circuiti di rilevamento della corrente e meccanismi di feedback per ottenere una regolazione precisa della coppia e un movimento stabile. Il Controllo Orientato al Campo (FOC) è comunemente implementato per regolare la coppia e la velocità del motore attraverso un controllo della corrente coordinato. I sensori Hall forniscono feedback sulla posizione del rotore, mentre i circuiti di rilevamento della corrente monitorano la corrente del motore per il controllo in anello chiuso e la protezione. Le fasi di potenza impiegano tipicamente driver di gate e MOSFET per commutare in modo efficiente le correnti del motore trifase.
I seguenti esempi illustrano l'elettronica comunemente utilizzata in sistemi di movimento e controllo di robot umanoidi simili. Dispositivi come il DRV10970, un driver BLDC trifase che opera a 5–18 V, 1 A RMS e 1,5 A di picco, servono come esempi per applicazioni BLDC a bassa potenza. L'Infineon MOTIX TLE9563-3QX può essere descritto come un IC di sistema per motori BLDC con driver di gate integrato, alimentazione e interfacce di comunicazione. È meglio presentato come un esempio integrato di controllo BLDC piuttosto che come un driver di giunto ad alta potenza autonomo. Un articolo separato copre il completo percorso di motore-driver, FOC, driver di gate, rilevamento della corrente, feedback dell'encoder e comunicazione CAN in elettronica BLDC nei robot umanoidi.
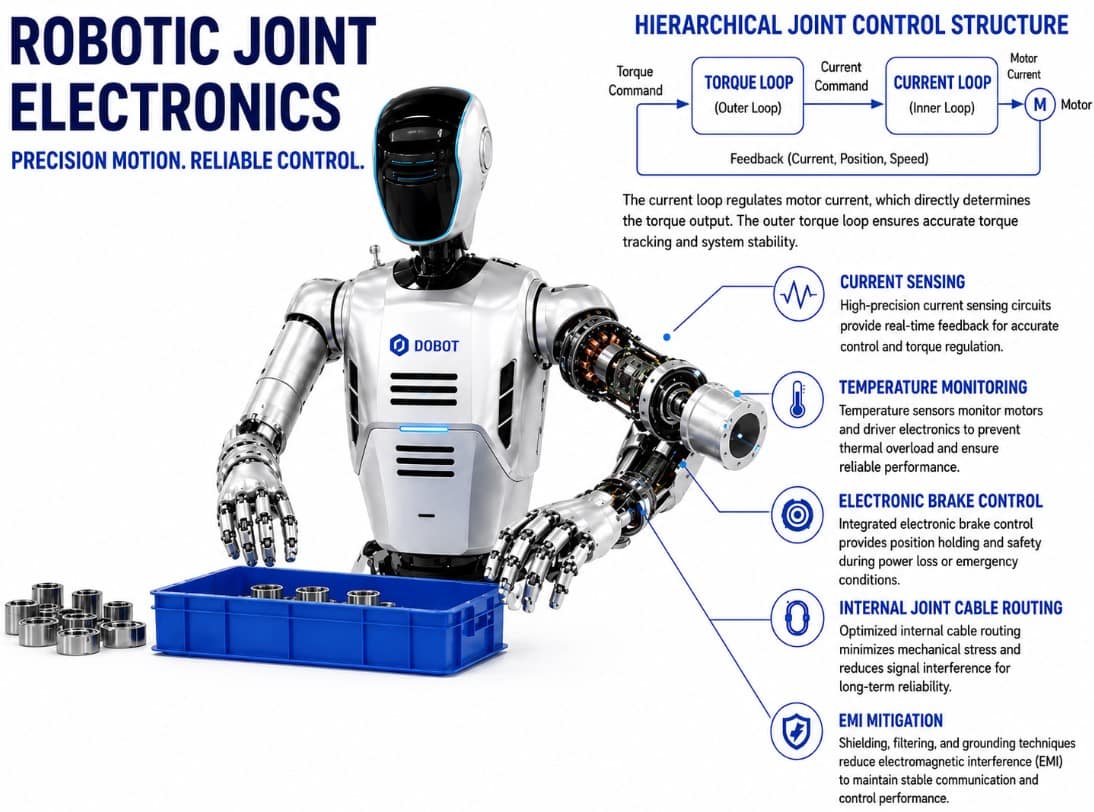
Figura 6. Elettronica dei Giunti
L'elettronica dei giunti robotici integra attuatori, fasi del driver del motore e sistemi di feedback per ottenere movimenti precisi e un funzionamento affidabile nei robot umanoidi. I controllori dei giunti implementano comunemente una struttura di controllo gerarchica composta da un loop di corrente e un loop di coppia esterno, dove la regolazione della corrente influenza direttamente l'uscita della coppia del motore.
I circuiti di rilevamento della corrente forniscono feedback per un controllo preciso, mentre i sensori di temperatura monitorano motori ed elettronica dei driver per prevenire sovraccarichi termici. Alcuni giunti robotici incorporano il controllo elettronico dei freni per il mantenimento della posizione e la sicurezza durante la perdita di alimentazione. Il cablaggio interno dei giunti deve minimizzare lo stress meccanico e l'interferenza dei segnali, mentre tecniche di mitigazione dell'interferenza elettromagnetica (EMI) come schermatura, filtraggio e messa a terra sono essenziali per mantenere una comunicazione e prestazioni di controllo stabili.
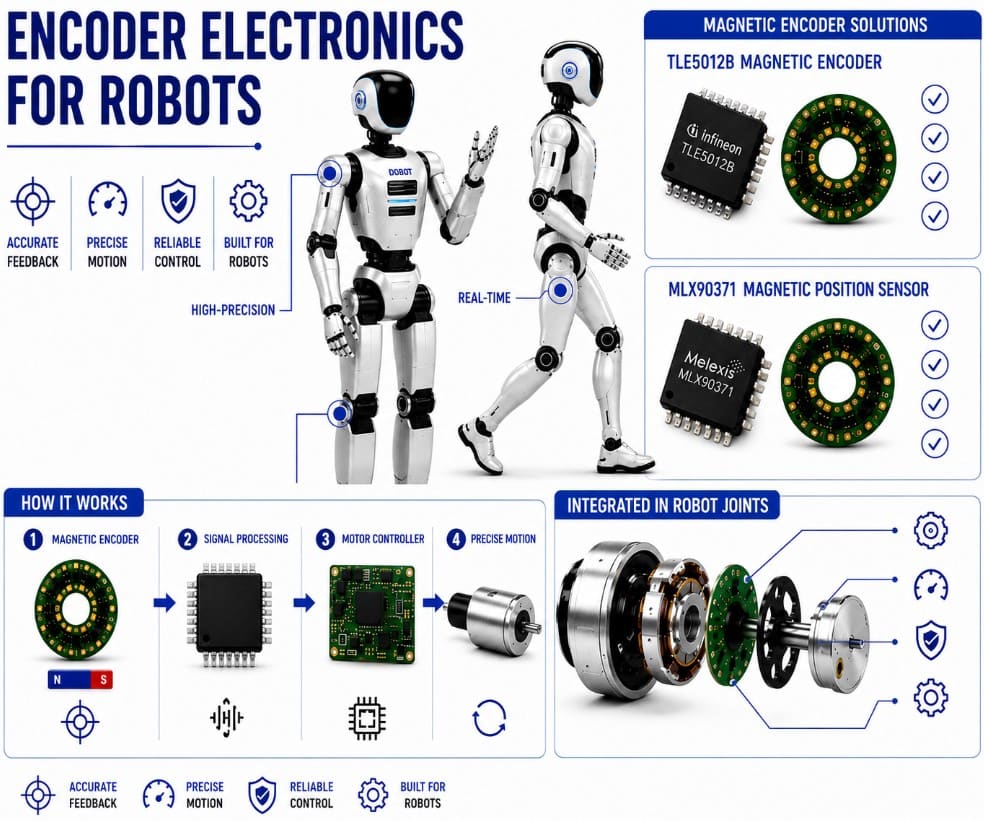
Figura 7. Elettronica degli Encoder
L'elettronica degli encoder per robot è essenziale nei sistemi umanoidi per un feedback accurato di posizione e velocità all'interno dei sistemi di controllo dei giunti. Questi sensori forniscono misurazioni in tempo reale necessarie per il controllo del motore in closed-loop, il tracciamento della traiettoria e la sincronizzazione del movimento.
I dispositivi di seguito rappresentano tecnologie comunemente utilizzate in architetture di rilevamento e feedback di posizione per robot umanoidi comparabili. Sensori angolari magnetici come l'Infineon
TLE5012B
 TLE5012B
Infineon
622
In Stock: 10100 pcs
TLE5012B
Infineon
622
In Stock: 10100 pcs
forniscono un rilevamento della posizione angolare a 360° utilizzando la tecnologia di rilevamento magnetico iGMR e la misura del campo seno/coseno. Questo li rende adatti per il feedback della posizione del rotore, il rilevamento dell'angolo del giunto e il controllo del motore in closed-loop in sistemi robotici comparabili.
Il MLX90371 è un altro sensore di posizione magnetico utilizzato per misurazioni rotazionali e lineari, offrendo rilevamento senza contatto e alta affidabilità in ambienti robotic. Integrato con i controllori del motore, l'elettronica degli encoder migliora l'accuratezza di posizionamento, la stima della velocità e le prestazioni complessive del controllo dei giunti.
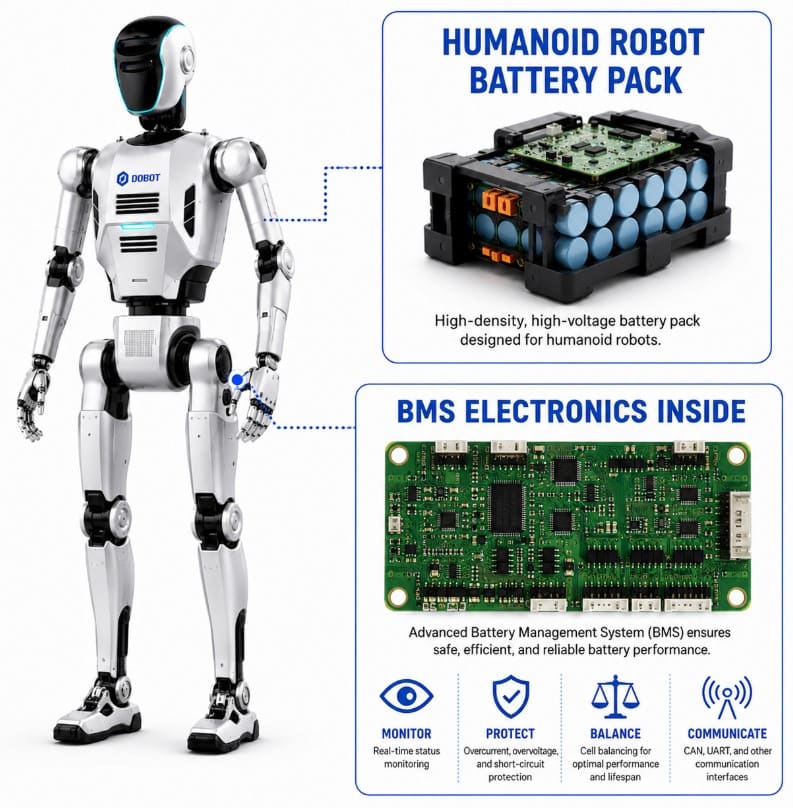
Figura 8. Elettronica BMS
L'elettronica del Sistema di Gestione della Batteria (BMS) è una funzione critica nei pacchi batteria dei robot umanoidi per garantire un funzionamento sicuro, distribuzione dell'energia e monitoraggio della salute della batteria. Un BMS per robot umanoidi supervisiona parametri come tensione delle celle, corrente, temperatura e stato di carica per prevenire sovraccarichi, scariche e guasti termici.
Gli esempi di componenti di seguito illustrano l'elettronica comunemente utilizzata in sistemi di gestione dell'energia per robot umanoidi simili. Dispositivi come il BQ76952 della Texas Instruments sono IC per il monitoraggio e la protezione delle batterie progettati per celle connesse in serie da 3 a 16, integrando monitoraggio della tensione, misurazione della corrente, funzioni di protezione e bilanciamento delle celle. L'LTC6811 dell'Analog Devices può monitorare fino a 12 celle della batteria connesse in serie con un errore di misurazione totale inferiore a 1,2 mV, fornendo misurazioni della tensione delle celle altamente accurate e supportando la comunicazione a catena per architetture scalabili di pacchi batteria. Queste elettroniche BMS migliorano la sicurezza, l'affidabilità e la gestione dell'energia nei sistemi robotici umanoidi.
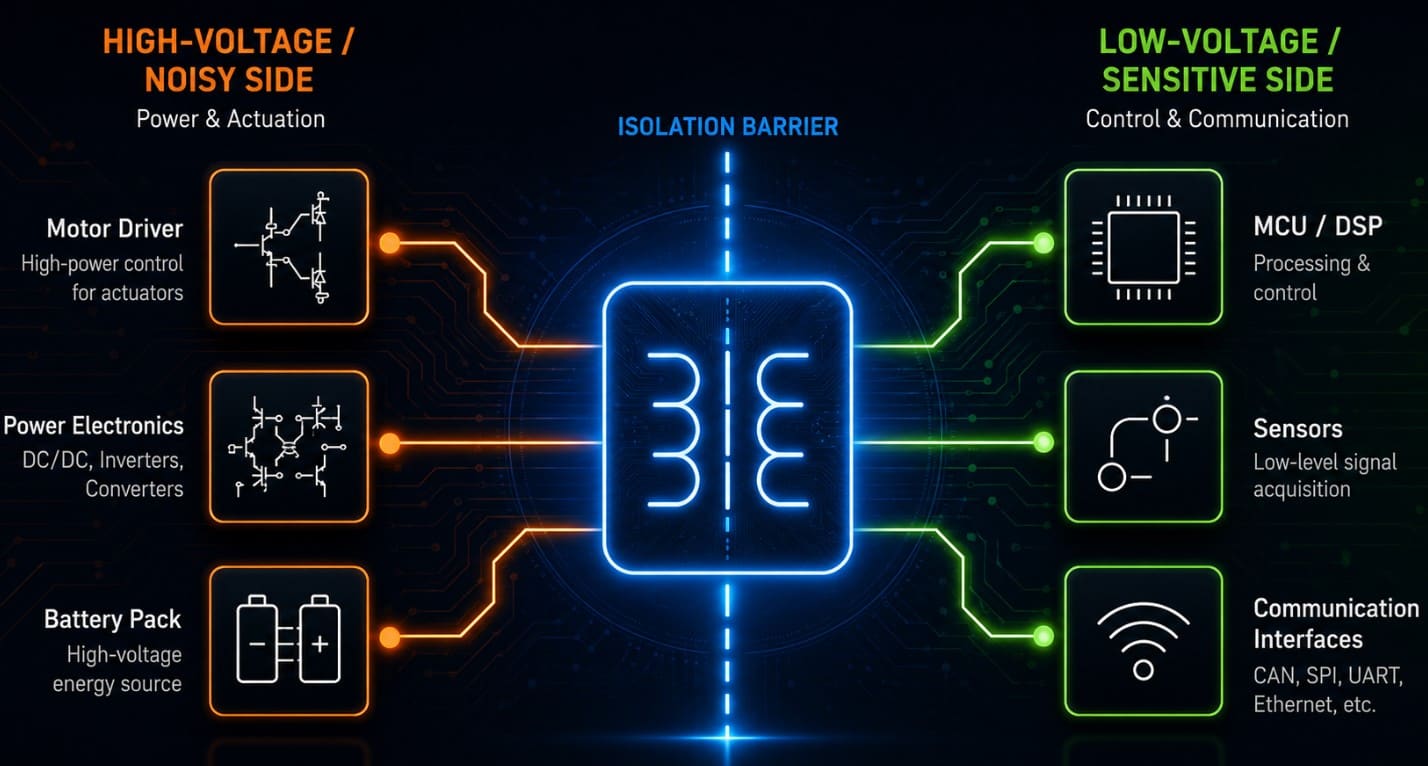
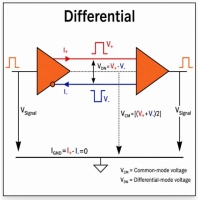
Figura 9. Elettronica di Isolamento e Protezione dei Segnali
L'elettronica di isolamento è essenziale nei robot umanoidi per proteggere i controllori a bassa tensione e i sistemi di comunicazione da stadi di motori ad alta tensione, rumori di commutazione e differenze di potenziale a terra. Questi dispositivi isolano elettricamente i percorsi del segnale mantenendo una trasmissione dati affidabile tra i domini di controllo e di potenza.
I dispositivi di seguito sono esempi di componenti comunemente utilizzati in sistemi di isolamento e protezione dei segnali robotici simili. Gli IC di isolamento come l'ISO7741 di Texas Instruments utilizzano tecnologia capacitiva e offrono un'alta immunità elettromagnetica con un grado di isolamento di fino a 5000VRMS. L'ADuM141D di Analog Devices utilizza la tecnologia iCoupler® e supporta comunicazioni isolate veloci con un ritardo massimo di propagazione di 13ns. Questi componenti migliorano la sicurezza, riducono la coppia di rumori e mantengono l'integrità del segnale nei sistemi robotici.
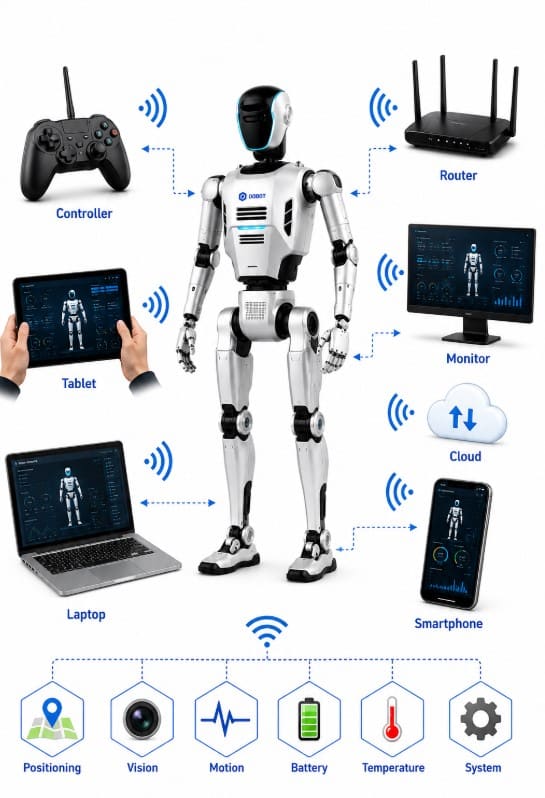
Figura 10. Robotica Wireless
L'elettronica wireless nei robot umanoidi consente la comunicazione tra sottosistemi integrati, dispositivi esterni e piattaforme di monitoraggio senza connessioni fisiche. Questi moduli supportano la comunicazione robotica wireless per controllo remoto, diagnostica e scambio di dati distribuiti.
Di seguito sono delineati esempi di componenti di comunicazione utilizzati in sistemi di rete robotici simili. L'
ESP32
ESP32
ESP
In Stock: 23322 pcs
, sviluppato da Espressif Systems, integra un microcontrollore con funzionalità Wi-Fi e Bluetooth integrate ed è comunemente utilizzato per la connettività di rete, interfacce mobili e comunicazione tra dispositivi wireless. In confronto, il
NRF24L01
 NRF24L01
Nordic Semiconductor ASA
IC RF TXRX ISM>1GHZ 20VFQFN
In Stock: 16602 pcs
NRF24L01
Nordic Semiconductor ASA
IC RF TXRX ISM>1GHZ 20VFQFN
In Stock: 16602 pcs
, sviluppato da Nordic Semiconductor, è un trasceivers RF a 2,4 GHz progettato per collegamenti wireless incorporati a corto raggio, consentendo comunicazioni a bassa potenza tra microcontrollori e moduli robotici distribuiti. Queste tecnologie svolgono ruoli di comunicazione distintivi all'interno delle architetture elettroniche dei robot umanoidi.
Condividi questo post