Resistenza del Motore Ventola Spiegata: Sintomi, Test, Sostituzione e Risoluzione dei Problemi
Jun 18
Visualizzazioni: 319
Circuiti integrati (ICS)
Interfaccia - Sensore, Touch capacitivoICS specializzatiPMIC-Regolatori di tensione-scopo specialePMIC-Regolatori di tensione-Regolatori lineariPMIC - Regolatori di tensione - Lineare + commutazionePMIC-Regolatori di tensione-linearePMIC - Regolatori di tensione - DC Switching RegolatoriPMIC - Regolatori di tensione - controller di commutazione DC CCPMIC-Riferimento tensionePMIC-v/f e f/v convertitoriPMIC-gestione termicaPMIC-SupervisoriConvertitori PMIC-RMS a CCPMIC-controllori di alimentazione, monitorController PMIC-Power over Ethernet (PoE)PMIC-Power Management-specializzatoPMIC - interruttori di distribuzione dell'alimentazione, driver di caricoPMIC-PFC (correzione del fattore di potenza)PMIC-o regolatori, diodi idealiPMIC-driver del motore, regolatoriPMIC-illuminazione, regolatori di zavorraPMIC-LED driverPMIC-driver laserPMIC-hot swap controllerPMIC-Gate driverPMIC-Full, Half-Bridge driverPMIC-misurazione dell'energiaPMIC-driver di visualizzazionePMIC-regolamento/gestione correntePMIC-Gestione batteriePMIC-caricabatteriePMIC-convertitori AC DC, Switchers offlineController di memoriaMemoria-configurazione Proms per FPGAMemoria-batterieMemoriaFunzioni di bus Logic-universaliLogica-traduttori, cambio di livelloLogica-Specialty LogicInterruttori logico-segnale, multiplexer, decoderRegistri di logica-spostamentoGeneratori e pedine logiche di paritàLogica-multivibratoriChiusure logicheLogica - porte e inverter - multifunzione, configurabileLogiche-cancelli e inverterLogica-infraditoLogica-memoria FIFOContatori logici, divisoriLogica-comparatoriLogica - Buffer, driver, ricevitori, ricetrasmettitoriElaborazione lineare-videoLineare-comparatoriMoltiplicatori lineari-analogici, divisoriLineare - Amplificatori - Amps e moduli videoLineare-amplificatori-scopo specialeLineare - amplificatori - strumentazione, amplificatori operativi, amplificatori tamponeLineare-amplificatori-audioInterfaccia-registrazione vocale e riproduzioneInterfaccia - UARTS (trasmettitore del ricevitore asincrono universale)Interface-TelecomInterfaccia-SpecializedTerminali di interfaccia-segnaleInterfaccia: buffer di segnale, ripetitori, splitterSerializzatori di interfaccia, deserializzatoriInterfaccia-sensore e rivelatore interfacceInterfaccia-moduliInterfaccia-modem-ICS e moduliInterfaccia-i/o espansoriInterface-filters-ActiveInterfaccia - encoder, decodificatori, convertitoriInterfaccia-driver, ricevitori, ricetrasmettitoriInterfaccia-sintesi digitale diretta (DDS)Interface-ControllersInterface-codecInterfaccia - switch analogici, multiplexer, demultiplexerInterfaccia-interruttori analogici-scopo specialeEmbedded-sistema su chip (SOC)Embedded-PLDS (dispositivo logico programmabile)Embedded-microprocessoriIncorporato - microcontrollori - specifico dell'applicazioneEmbedded-MicrocontrolloriIncorporato - microcontrollore, microprocessore, moduli FPGAIncorporato - FPGA (array di gate programmabile sul campo) con microcontrolloriEmbedded - FPGAS (Array di gate programmabile sul campo)Embedded-DSP (Digital Signal Processor)Incorporato - CPLDS (dispositivi logici programmabili complessi)Acquisizione dati-touch screen controllerAcquisizione dei dati - Convertitori digitali a analogici (DAC)Acquisizione dati-potenziometri digitaliAcquisizione dei dati - Analogico a Convertitori digitali (ADC)Acquisizione dati-front end analogico (AFE)Acquisizione dati-ADC/DAC-scopo specialeOrologio/Timing-orologi in tempo realeClock/Temping - Timer e oscillatori programmabiliBatterie Clock/Timing-ICLinee orologio/temporizzazione-ritardoClock/Temping - Generatori di clock, PLL, sintetizzatori di frequenzaBuffer orologio/temporizzatore, driverOrologio/Timing-specifica dell'applicazioneAudio scopo specialeProduttore caldo
More categories
Prodotti a semiconduttore discreti
Regolazione attuale - diodi, transistorTransistor-scopo specialeTransistor-unijunction programmabileTransistor-JFETTransistori-IGBTs-singoloTransistori-IGBTs-moduliTransistori-IGBTs-matriciTransistor-FET, MOSFET-singoloTransistor-FET, MOSFET-RFTransistor-FET, MOSFET-matriciTransistor - Bipolare (BJT) - singolo, pre -poialatoTransistor-bipolare (BJT)-singoloTransistor-bipolare (BJT)-RFTransistor - Bipolare (BJT) - Array, pre -polarizzatoTransistor-bipolare (BJT)-matriciTiristori-triacTiristori-SCRS-moduliTiristori-SCRSTiristori-diac, sidacsModuli del driver di alimentazioneDiodi-Zener-singoloDiodi-zener-matriciDiodi-capacità variabile (Varicaps, Varactors)Diodi-RFDiodi-raddrizzatori-singoloDiodi-raddrizzatori-matriciDiodi-raddrizzatori ponteProduttore caldo
More categories
Condensatori
Trimmers, condensatori variabiliCondensatori a film sottileCondensatori di tantalioCondensatori del tantalio-polimeroCondensatori di silicioCondensatori di ossido di niobioMica e condensatori di PTFECondensatori della pellicolaCapacità elettriche a doppio strato (EDLC), supercondensatoriCondensatori ceramiciReti di condensatori, matriciCondensatori elettrolitici in alluminioCondensatori di alluminio-polimeroProduttore caldo
More categories
Protezione del circuito
TVS - Dispositivi di protezione da Surge (SPDS)Televisori-varistori, MovsTelevisori-tiristoriTV-tecnologia mistaTelevisori-diodiTaglio termico (fusibili termici)Surge soppressione ICSFusibili PTC azzerabiliProtezione dell'illuminazioneLimitatori di corrente di spunto (ICL)Interruttore di guasto a terra (GFCI)Arresti del tubo di scarico del gas (GDT)FusibiliPortafusibiliFusibili elettrici e specialiInterruttoriProduttore caldo
More categories
Isolatori
Scopo specialeOptoisolatori-Triac, uscita SCROptoisolatori-Transistor, uscita fotovoltaicaOptoisolatori-Uscita logicaIsolatori-Gate driverIsolatori digitaliProduttore caldo
More categories
RF/IF e RFID
Schede Modulo di identificazione degli abbonati (SIM)Circolatori e isolatori RFRFID, accesso RF, monitoraggio ICSTransponder RFID, TagModuli lettore RFIDKit di valutazione e sviluppo RFID, schedeAntenne RFIDRFI e EMI-schermatura e materiali assorbentiRFI e EMI-contatti, Fingerstock e guarnizioniTrasmettitori RFModuli ricetrasmettitori RFRicetrasmettitore RF ICSInterruttori RFScudi RFRicevitori RFRicevitore, trasmettitore e ricetrasmettitore RF unità finiteDivisori/Splitter di potere di RFRF Power Controller ICSModulatori RFMixer RFRF misc ICS e moduliFront-end RF (LNA + PA)Kit di valutazione e sviluppo RF, schedeAccoppiatore direzionale RFDiplexer RFRivelatori RFDemodulatori RFAntenne RFAmplificatori RFBalunAttenuatoriProduttore caldo
More categories
Filtri
Filtri segaFiltri RFModuli filtro linea di alimentazioneCristalli monoliticiFiltri elicoidaliDischi e piastre in ferriteNuclei di ferrite-Cavi e cablaggiPerline e patatine in ferriteAlimentazione tramite condensatoriFiltri EMI/RFI (LC, reti RC)Filtri DSLStrozzatori in modalità comuneFiltri ceramiciProduttore caldo
More categories
Sensori, trasduttori
Ricevitori ad ultrasuoni, trasmettitori - industrialeSensori di temperatura - termostati - meccanico - industrialeSensori di temperatura - Output analogico e digitale - IndustrialSensori di prossimità - IndustrialSensori di pressione, trasduttori - IndustrialiSensori ottici - Fotonics - Contatori, rilevatori, SPCM (modulo di conteggio dei fotoni singoli)Sensori ottici - Moduli della fotocameraSensori magnetici - posizione, prossimità, velocità (moduli) - industrialeSensori di forza - IndustrialeSensori di flusso - IndustrialeFloat, Sensori di livello - IndustrialeECCODERS - IndustrialSensori a colori - IndustrialSensori tattiliRicevitori ultrasonici, trasmettitoriSensori di temperatura-termostati-stato solidoSensori di temperatura-termostati-meccaniciSensori di temperatura: termocoppie, sonde di temperaturaSensori di temperatura - RTD (rilevatore di temperatura di resistenza)Sensori di temperatura-termistori PTCSensori di temperatura-termistori NTCSensori di temperatura - Output analogico e digitaleEstensimetriSensori specializzatiCelle solariSensori di shockInterfaccia sensore-blocchi di giunzioneCavo del sensore-assembleeSensori di vicinanza/occupazione-unità finiteSensori di prossimitàSensori di pressione, trasduttoriSensori di posizione - angolo, misura di posizione lineareSensori ottici-uscita logica riflettenteSensori ottici-uscita riflettente-analogicaSensori ottici-FototransistorSensori ottici - fotointerruttori - Tipo di slot - Output del transistorSensori ottici - fotointerruttori - Tipo di slot - Output logicoSensori ottici-fotoelettrico, industrialeSensori ottici-fotodiodiSensori ottici - Rilevatori fotografici - Ricevitore remotoSensori ottici - Rilevatori fotografici - Output logicoSensori ottici-Rivelatori fotografici-celle CDSSensori ottici-misurazione della distanzaSensori ottici-luce ambientale, IR, sensori UVMultifunzioneSensori di movimento-vibrazioneSensori di movimento-interruttori TiltSensori di movimento-otticoSensori di movimento-inclinometriSensori di movimento - imus (unità di misurazione inerziale)Sensori di movimento-giroscopiSensori di movimento-accelerometriMagneti-sensore abbinatoMagneti-multiusoSensori magnetici-interruttori (stato solido)Sensori magnetici - Posizione, prossimità, velocità (moduli)Sensori magnetici-lineari, bussola (ICS)Sensori magnetici - bussola, campo magnetico (moduli)Trasduttori LVDT (trasformatore differenziale variabile lineare)Moduli per ricetrasmettitori IrDASensori di immagine, fotocameraUmidità, sensori di umiditàSensori gasSensori di forzaSensori di flussoFloat, sensori di livelloEncoderSensori di polvereTrasduttori di correnteSensori di coloreAmplificatoriProduttore caldo
More categories
Relè
Relè di sicurezzaRelè reedRelè ad alta frequenza (RF)Contattori (a stato solido)Contattori (elettromeccanici)Relè automobilisticiRelè a stato solidoRelè di segnale, fino a 2 amperePrese relèRelè di potenza, oltre 2 ampereModuli di relè I / OI/o rack modulo relèProduttore caldo
More categories
Trasformatori
Convertitore di commutazione, trasformatori SMPSTrasformatori specialiTrasformatori a impulsiTrasformatori di potenzaTrasformatori di isolamento e autotrasformatori, calpestare, scendere verso il bassoTrasformatori di senso correnteTrasformatori audioProduttore caldo
More categories
Resistenze
Attraverso resistenze foroResistenze specializzateReti resistori, matriciResistore truciolo-supporto di superficieChassis Mount ResistorsProduttore caldo
More categories
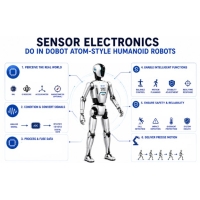
I robot umanoidi come il DOBOT Atom si basano su elettronica visiva per catturare, elaborare, analizzare e interpretare informazioni visive dall'ambiente circostante. Anche se l'hardware specifico utilizzato nei diversi robot può variare, l'architettura visiva sottostante è spesso simile. Questo articolo spiega come i sensori delle telecamere, l'elettronica di elaborazione del segnale dell'immagine, i microcontrollori, gli SoC, i processori AI, le interfacce di comunicazione e i sistemi di controllo di retroazione lavorino insieme per supportare la percezione visiva e il funzionamento del robot in tempo reale. I modelli IC presentati nel corso dell'articolo sono esempi pratici di componenti comunemente utilizzati in applicazioni simili di elettronica visiva.

Figura 1. L'elettronica visiva abilita la percezione nei robot umanoidi in stile DOBOT Atom
L'elettronica visiva nei robot umanoidi in stile DOBOT Atom segue una catena di segnale di acquisizione delle immagini, elaborazione, inferenza AI, trasferimento dei dati e retroazione di controllo. Il processo inizia quando i sensori delle telecamere catturano la luce e le informazioni visive dall'ambiente circostante. L'elettronica di elaborazione del segnale converte quindi l'output del sensore in dati immagine digitali e migliora la qualità dell'immagine tramite funzioni di filtraggio e miglioramento. I microcontrollori e gli SoC gestiscono il flusso dei dati visivi e li distribuiscono all'hardware di elaborazione AI. I processori AI analizzano le immagini per identificare oggetti, riconoscere volti e gesti, stimare la profondità e il movimento e comprendere l'ambiente. Le informazioni risultanti vengono inviate al sistema di controllo del robot, che regola la navigazione, l'evitamento degli ostacoli, l'interazione e il movimento in tempo reale.

Figura 2. Dall'input della telecamera all'azione del robot
I sensori della fotocamera forniscono la principale fonte di informazioni visive nei robot umani in stile DOBOT Atom. Le informazioni disponibili pubblicamente indicano che il sistema di visione può incorporare diverse tecnologie di fotocamere, comprese fotocamere binocolo Full HD, fotocamere RGB, fotocamere RGB-D e moduli di rilevamento della profondità come l'Intel RealSense D455. Come parte fondamentale dell'elettronica di visione in stile DOBOT Atom, le fotocamere binocolo utilizzano sensori di immagine a doppia sincronizzazione per supportare la percezione della profondità e la localizzazione degli oggetti attraverso la visione stereoscopica, abilitando la funzionalità comunemente associata a un robot con visione binoculare. Le fotocamere RGB-D combinano l'imaging a colori con la misurazione della profondità per generare dati ambientali tridimensionali, rendendole adatte per un robot dotato di fotocamera RGB-D, mentre i moduli dedicati al rilevamento della profondità supportano le capacità di misurazione della distanza necessarie in un robot con fotocamera di profondità. Insieme, queste elettroniche di visione catturano informazioni visive per il rilevamento degli oggetti, la navigazione, l'evitamento degli ostacoli, la mappatura ambientale e i compiti di interazione uomo-robots.
| Visione Fase |
Cosa Succede |
Esempi Dispositivi / Interfacce |
| Acquisizione dell'immagine |
Converte la luce in dati di immagine |
Sony IMX415, Sony IMX577, onsemi AR0234 |
| Rilevamento della profondità |
Misura la distanza o genera mappe di profondità |
Intel RealSense D455, VL53L5CX |
| Interfaccia della fotocamera |
Invia i dati dell'immagine al processore |
MIPI CSI-2, USB 3.1, Ethernet |
| Elaborazione del segnale dell'immagine |
Riduce il rumore, corregge l'esposizione, prepara i fotogrammi dell'immagine |
i.MX 8M Plus ISP, RP1 interfaccia camera |
| Inferenza AI |
Rileva oggetti, gesti, persone ed elementi della scena |
Jetson Orin NX, Jetson Xavier NX, RZ/V2H, Hailo-8 |
| Uscita di controllo |
Invia coordinate o decisioni al controller del robot |
MCU, SoC, Ethernet, CAN, controller di movimento |

Figura 3. RGB, Binoculare, RGB-D, ToF e LiDAR
Le fotocamere e i sensori di profondità forniscono il primo input visivo per i robot umani in stile DOBOT Atom. I sensori RGB catturano immagini a colori, le fotocamere binocolo stimano la profondità attraverso due punti di vista, le fotocamere RGB-D forniscono dati di colore e distanza, e i sensori ToF o LiDAR misurano la distanza degli oggetti attraverso la luce riflessa. Questi dispositivi forniscono solo fotogrammi immagine, mappe di profondità o valori di distanza. L'ISP, l'elaborazione AI e le decisioni di controllo del robot sono trattate nelle sezioni seguenti.
| Tipo di sensore |
Modello di esempio |
Produttore |
Utilizzo della visione |
| Sensore di immagine RGB |
Sony IMX415 |
Sony |
Acquisizione di immagini ad alta risoluzione |
| Sensore di immagine RGB |
Sony IMX577 |
Sony |
Moduli di fotocamera di visione integrata |
| Sensore con otturatore globale |
AR0234CS |
onsemi |
Acquisizione di oggetti in movimento con meno distorsione |
| Modulo fotocamera RGB-D |
Intel RealSense D455 |
Intel |
Rilevamento della profondità e localizzazione degli oggetti |
| Sensore Multi-Zona ToF |
VL53L5CX |
STMicroelectronics |
Rilevamento a profondità a breve distanza |
| Sensore di distanza ToF |
 VL53L1X
ST
1141
In Stock: 16437 pcs
VL53L1X
ST
1141
In Stock: 16437 pcs
|
STMicroelectronics |
Consapevolezza della prossimità e delle collisioni |
| Modulo LiDAR |
TFMini-S |
Benewake |
Rilevamento della distanza compatto |
| Modulo LiDAR 2D |
RPLIDAR A1 / A2 |
Slamtec |
Mappatura e scansione di ostacoli più ampia |
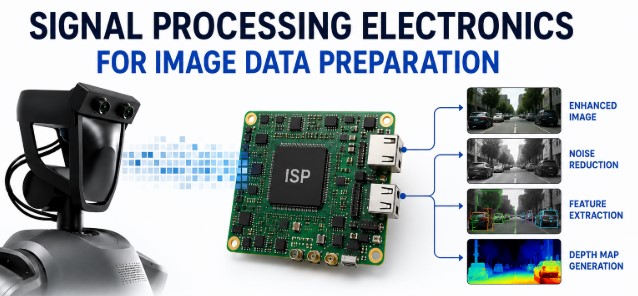
Figura 4. ISP e SoC di Visione per l'elaborazione dei dati della fotocamera
Gli ISP (Image Signal Processor) e i dispositivi Vision SoC (System-on-Chip) elaborano i dati delle immagini grezze catturati dai sensori della fotocamera prima che vengano utilizzati da algoritmi di visione artificiale e AI. Questi dispositivi svolgono funzioni come riduzione del rumore, controllo dell'esposizione, correzione del colore, regolazione del bilanciamento del bianco, elaborazione HDR, miglioramento dell'immagine, ridimensionamento dell'immagine e formattazione video. I Vision SoC gestiscono anche le interfacce delle fotocamere, coordinano il flusso dei dati, eseguono algoritmi di visione e supportano compiti di inferenza AI come il rilevamento degli oggetti, il riconoscimento facciale, il tracciamento dei gesti, la stima della profondità e la comprensione della scena. Nei robot umani, i dispositivi ISP e Vision SoC aiutano a convertire l'output del sensore grezzo in informazioni visive utilizzabili per la navigazione, la consapevolezza ambientale, l'evitamento degli ostacoli e l'interazione uomo-robot.
| Modello |
Produttore |
Posizione Corretta |
Ruolo di Elaborazione |
| i.MX 8M Plus |
NXP |
Vision SoC con doppio ISP e NPU |
Ingresso della fotocamera, elaborazione ISP, ridimensionamento dell'immagine e inferenza di visione incorporata |
| RP1 |
Raspberry Pi |
Raspberry Pi 5 / CM5 I/O controller |
Input camera CSI-2, gestione dei dati dell'immagine e funzioni front-end ISP |
| CV1800B |
CVITEK |
Piattaforma Edge vision SoC / ISP |
Elaborazione di immagini a basso costo e applicazioni di visione incorporata |
| Ambarella CV22 |
Ambarella |
Vision SoC con integrazione ISP e accelerazione della visione AI |
Elaborazione video, gestione delle immagini della fotocamera e carichi di lavoro di visione incorporata |
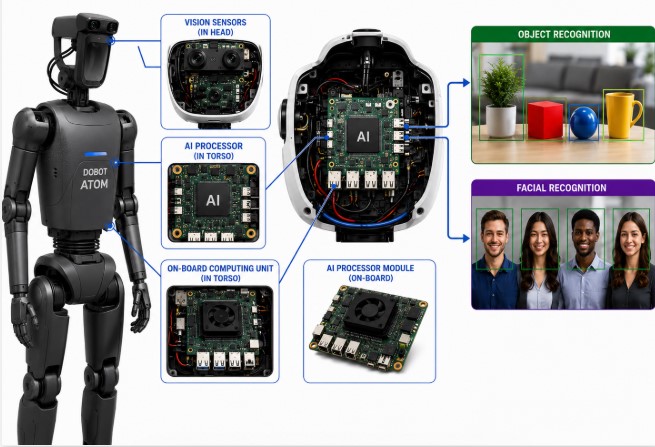
Figura 5. Processori AI per il riconoscimento visivo e dei gesti e la comprensione della scena
I processori AI forniscono la potenza di calcolo necessaria per la percezione visiva e il processo decisionale nei robot umanoidi in stile DOBOT Atom. Basandosi su informazioni pubblicamente disponibili, questi sistemi supportano la tecnologia Vision-Language-Action (VLA), che combina la percezione visiva, la comprensione del linguaggio e la generazione di azioni all'interno di un framework AI unificato. Dopo che telecamere, sensori RGB-D e LiDAR raccolgono dati ambientali, i processori AI eseguono algoritmi di visione artificiale per il riconoscimento degli oggetti, il riconoscimento facciale, il riconoscimento dei gesti, la stima della profondità, la comprensione della scena, il tracciamento della postura corporea, l'analisi del movimento delle mani e la consapevolezza degli ostacoli. Il riconoscimento dei gesti consente al robot di identificare segnali manuali, direzioni di punta, movimenti di saluto e altre azioni umane per un'interazione senza contatto e avvio dei compiti. Le informazioni elaborate aiutano il robot a localizzare oggetti, riconoscere individui, interpretare gesti, comprendere l'ambiente circostante e supportare compiti di manipolazione e navigazione. Le piattaforme di calcolo AI ad alte prestazioni consentono a queste funzioni di operare in tempo reale, supportando un comportamento robotico autonomo e interattivo.
11
I modelli IC sopra sono esempi rappresentativi comunemente utilizzati per l'elaborazione della visione AI in applicazioni robotiche e di visione incorporata.
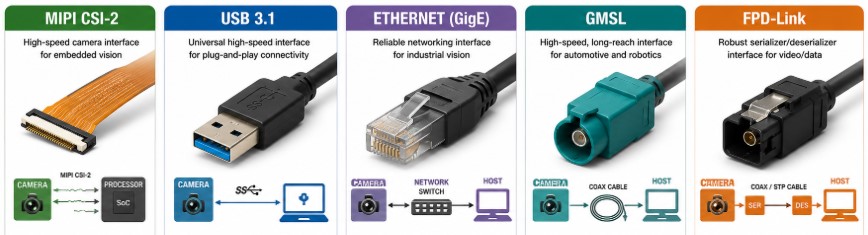
Figura 6. MIPI CSI-2, USB 3.1, Ethernet, GMSL e FPD-Link
Le interfacce di dati di visione trasferiscono dati di immagine e sensore tra telecamere, processori e sistemi di controllo all'interno dei robot umanoidi. Dopo che i sensori delle telecamere catturano informazioni visive, le interfacce di comunicazione trasportano i dati delle immagini a microcontrollori, processori di visione e piattaforme di calcolo AI per ulteriori analisi. Queste interfacce devono supportare elevati tassi di trasferimento dati, bassa latenza e comunicazione affidabile per consentire la percezione visiva in tempo reale, la navigazione, il tracciamento degli oggetti, il riconoscimento dei gesti e il controllo del robot all'interno di un sistema di visione robotico.
Esempi comuni includono MIPI CSI-2 per connessioni dirette ad alta velocità da telecamera a processore, USB 3.1 per telecamere di visione ad alta larghezza di banda e Ethernet Gigabit per sistemi di telecamere basati su rete. Per applicazioni che richiedono lunghezze di cavo più lunghe e maggiore immunità al rumore, GMSL (Gigabit Multimedia Serial Link) e FPD-Link III sono ampiamente utilizzati per trasmettere video, dati di controllo e segnali di sincronizzazione tra telecamere distribuite e unità di elaborazione. Queste interfacce aiutano a garantire che i dati visivi vengano consegnati in modo accurato ed efficiente in tutto il sistema di visione robotica. Gli IC di interfaccia elencati nella tabella sottostante sono esempi rappresentativi utilizzati in applicazioni di visione e robotica.
| Funzione dell'interfaccia |
Prodotto di esempio |
Fabbricante |
Ruolo principale |
| Controller interfaccia USB 3.1 |
CYUSB3014-BZXI / EZ-USB FX3 |
Infineon Technologies |
Trasferimento ad alta velocità dei dati di immagine tra l'hardware della fotocamera e i processori ospiti |
| PHY Ethernet Gigabit |
KSZ9031RNX
N/A
MICRCOHIP QFN48
In Stock: 113 pcs
|
Microchip Technology |
PHY Ethernet 10/100/1000 Mbps per sistemi di visione in rete |
| Serializzatore GMSL |
MAX9295A |
Analog Devices |
Trasmissione video della telecamera a lunga distanza |
| Deserializzatore GMSL |
MAX9296A |
Analog Devices |
Riceve dati video della telecamera serializzati |
| Serializzatore FPD-Link III |
DS90UB953-Q1
TEXAS INSTRUMENTS
583
In Stock: 32450 pcs
|
Texas Instruments |
Serializzatore per la trasmissione ad alta velocità dei dati di immagine |
| Deserializzatore FPD-Link III |
DS90UB954-Q1
TEXAS INSTRUMENTS
583
In Stock: 32550 pcs
|
Texas Instruments |
Riceve e aggrega dati della telecamera ad alta velocità |
| Controller wireless |
ESP32
ESP
In Stock: 23322 pcs
|
Espressif Systems |
Configurazione wireless a bassa velocità, monitoraggio o scambio di dati ausiliari |
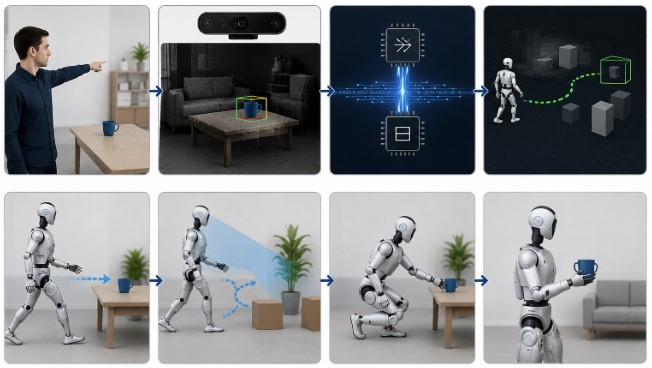
Figura 7. Flusso di controllo Vision-to-Action nei robot umanoidi
Dopo che le telecamere, i sensori di profondità e i processori AI identificano oggetti, ostacoli, gesti o movimenti all'interno dell'ambiente, le informazioni di controllo risultanti devono essere consegnate al sistema di movimento del robot per l'azione fisica. L'elettronica di comunicazione fornisce il percorso per trasferire i dati tra i processori di visione, i controller di sistema, i sensori e i sotto-sistemi degli attuatori. Come parte chiave dell'elettronica visiva dei robot umani, questi dispositivi trasferiscono le coordinate degli oggetti, le posizioni bersaglio, le posizioni degli ostacoli, le traiettorie di movimento e i comandi di navigazione generati dall'analisi visiva, consentendo risposte in tempo reale alle mutevoli condizioni ambientali.
Per i dati delle telecamere ad alta larghezza di banda, il livello di visione può utilizzare USB, Ethernet, GMSL, FPD-Link o MIPI CSI-2 a seconda della posizione della telecamera, della lunghezza del cavo, del livello di rumore e dell'architettura di elaborazione. I collegamenti wireless a bassa velocità possono gestire monitoraggio o configurazione, ma non dovrebbero essere trattati come il percorso principale per i flussi video delle telecamere in tempo reale.
Ad esempio, se una persona indica un oggetto specifico, le telecamere del robot e i processori di visione AI possono riconoscere il gesto, determinare la posizione dell'oggetto e calcolare la sua posizione all'interno dell'ambiente circostante. L'elettronica di comunicazione trasferisce quindi queste informazioni al controller del robot, che genera comandi di movimento per le braccia, le mani o il sistema di locomozione. Il robot può successivamente avvicinarsi all'obiettivo, evitare ostacoli lungo il percorso e svolgere azioni come raccogliere, ispezionare o consegnare l'oggetto. Questa sequenza dimostra come la percezione visiva venga convertita in azione fisica coordinata in tempo reale.
I sistemi di visione si basano su più tipi di circuiti integrati per catturare, elaborare, analizzare e trasmettere informazioni visive. Sebbene l'hardware specifico utilizzato in DOBOT Atom non sia stato reso pubblico, i seguenti prodotti e componenti rappresentano esempi comunemente trovati in architetture di visione robotica simili e possono eseguire funzioni comparabili a quelle richieste in un sistema di visione DOBOT Atom.
Il nostro sito web fornisce molti dei modelli di elettronica visiva elencati di seguito, inclusi sensori di immagine, processori di visione AI, circuiti integrati di interfaccia e PHY Ethernet. Puoi contattarci per prezzi, disponibilità e alternative compatibili per prototipazione o esigenze di produzione.
Prodotti e Componenti di Elettronica Visiva Esempi
| Funzione Visiva |
Prodotto Esemplare |
Produttore |
Ruolo Primario |
| Sensore di Telecamera RGB |
Sony IMX415 |
Sony Semiconductor Solutions |
Cattura dati di immagine ad alta risoluzione per l'individuazione di oggetti e la percezione visiva |
| Sony IMX577 |
Sony Semiconductor Solutions |
Cattura dell'immagine di alta qualità per sistemi di visione robotica |
|
| Sensore di Telecamera a Otturatore Globale |
AR0234CS |
onsemi |
Cattura di immagini favorevole al movimento con distorsione ridotta del movimento |
| Sensore di Profondità (ToF) |
VL53L5CX |
STMicroelectronics |
Misurazione della distanza e generazione di mappe di profondità |
| Telecamera RGB-D |
Intel RealSense D455 |
Intel |
Acquisizione simultanea di immagini a colori e rilevamento della profondità |
| Vision SoC / ISP |
i.MX 8M Plus |
NXP Semiconductors |
Elaborazione del segnale dell'immagine, visione integrata e accelerazione AI |
| CV1800B |
CVITEK |
Elaborazione delle telecamere e applicazioni di visione integrata |
|
| Controller dell'Interfaccia della Telecamera |
RP1 |
Raspberry Pi |
Interfaccia della telecamera CSI-2 e gestione dei dati delle immagini |
| Microcontrollore |
 STM32H743ZIT6
STMicroelectronics
IC MCU 32BIT 2MB FLASH 144LQFP
In Stock: 5338 pcs
STM32H743ZIT6
STMicroelectronics
IC MCU 32BIT 2MB FLASH 144LQFP
In Stock: 5338 pcs
|
STMicroelectronics |
Controllo della telecamera, sincronizzazione dei sensori e coordinazione del sistema |
| Processore di Visione AI |
Jetson Orin NX 16GB |
NVIDIA |
Inferenza AI in tempo reale, individuazione di oggetti e comprensione della scena |
| Jetson Xavier NX |
NVIDIA |
Visione AI integrata e elaborazione multi-telecamera |
|
| RZ/V2H |
Renesas |
Elaborazione visiva basata su AI con acceleratore DRP-AI integrato |
|
| Acceleratore AI |
Hailo-8 |
Hailo |
Inferenza AI edge a bassa potenza per carichi di lavoro visivi |
| Myriad X MA2485 |
Intel |
Accelerazione della visione artificiale e elaborazione delle reti neurali |
|
| Coral Edge TPU |
Google |
Accelerazione AI edge per il riconoscimento di oggetti e gesti |
|
| Controller dell'Interfaccia USB 3.1 |
CYUSB3014-BZXI (EZ-USB FX3) |
Infineon Technologies |
Trasferimento di immagini ad alta velocità tra telecamere e processori |
| PHY Ethernet |
KSZ9031RNX
N/A
MICRCOHIP QFN48
In Stock: 113 pcs
|
Microchip Technology |
Comunicazione Ethernet Gigabit per sistemi di visione |
| Serializzatore GMSL |
MAX9295AFTN/V+ |
Analog Devices |
Trasmissione a lungo raggio dei dati video della camera |
| Deserializzatore FPD-Link III |
DS90UB954-Q1
TEXAS INSTRUMENTS
583
In Stock: 32550 pcs
|
Texas Instruments |
Ricezione e elaborazione dei dati della camera ad alta velocità |
| Controllore di comunicazione wireless |
ESP32
ESP
In Stock: 23322 pcs
|
Espressif Systems |
Scambio di dati wireless, monitoraggio remoto e networking di sensori |
| Deserializzatore GMSL |
MAX9296A |
Analog Devices |
Riceve dati video della camera serializzati dai link GMSL |
| Serializzatore FPD-Link III |
DS90UB953-Q1
TEXAS INSTRUMENTS
583
In Stock: 32450 pcs
|
Texas Instruments |
Trasmette dati del sensore della camera ad alta velocità tramite FPD-Link III |
| Sensore di profondità (ToF) |
VL53L1X
ST
1141
In Stock: 16437 pcs
|
STMicroelectronics |
Sensing della distanza ToF a lungo raggio per rilevazione della prossimità e consapevolezza delle collisioni |
| Modulo LiDAR |
TFMini-S |
Benewake |
Sensing della distanza LiDAR compatto per rilevamento degli ostacoli e supporto alla navigazione dei robot |
| Modulo LiDAR 2D |
RPLIDAR A1 / A2 |
Slamtec |
Scansione su aree più ampie, mappatura e consapevolezza degli ostacoli per piattaforme di robot mobili |
| SoC Vision embedded / Processore AI |
RK3588
ROCKCH
867
In Stock: 729 pcs
|
Rockchip |
Elaborazione vision embedded basata su NPU per piattaforme di visione robotica sensibili ai costi |
I modelli di IC elencati sopra sono esempi rappresentativi comunemente utilizzati nelle applicazioni di visione artificiale, visione embedded e robotica. Se desideri una spiegazione più ampia dell'elettronica di visione nei robot umanoidi, inclusi sensori per fotocamera, processori AI, sensing della profondità e controllo visione-azione, leggi la nostra guida completa su elettronica del DOBOT Atom e dei robot umanoidi.
STMicroelectronics
IC MCU 32BIT 2MB FLASH 144LQFP
Disponibile: 5338pcs
N/A
MICRCOHIP QFN48
Disponibile: 113pcs
TEXAS INSTRUMENTS
583
Disponibile: 32450pcs
TEXAS INSTRUMENTS
583
Disponibile: 32550pcs
ESP
Disponibile: 23322pcs
ROCKCH
867
Disponibile: 729pcs
ST
1141
Disponibile: 16437pcs
L'elettronica di visione è la catena hardware che cattura dati di immagine o di profondità, elabora i segnali della fotocamera, esegue algoritmi di visione AI e invia i risultati visivi al controller del robot per la navigazione, il tracciamento degli oggetti, il riconoscimento dei gesti o la manipolazione.
Le fotocamere RGB-D e per la profondità forniscono sia immagini a colori che informazioni sulla distanza. Questo aiuta i robot umanoidi a stimare la posizione degli oggetti, rilevare ostacoli, mappare lo spazio circostante e supportare la coordinazione mano-occhio.
Un sensore d'immagine cattura la luce, un ISP prepara l'immagine tramite controllo dell'esposizione e riduzione del rumore, e un processore AI esegue compiti di riconoscimento come rilevamento di oggetti, riconoscimento facciale, rilevamento di gesti o comprensione della scena.
Intel RealSense D455 è un modulo fotocamera di profondità stereo, non un singolo IC. Fornisce dati RGB e di profondità tramite un'interfaccia USB e può essere utilizzato come esempio di sensing RGB-D nei sistemi di visione robotica.
Il processore di visione fornisce informazioni come coordinate degli oggetti, mappe di profondità, risultati di tracciamento o etichette di gesti. Il controller del robot converte queste informazioni in obiettivi di movimento, aggiornamenti di navigazione o comandi di presa, mentre i controller di motore e giunto eseguono il movimento.

Jun 23
Visualizzazioni: 84

Jun 22
Visualizzazioni: 167

Jun 18
Visualizzazioni: 1449

Jun 18
Visualizzazioni: 319
Jun 18
Visualizzazioni: 395
Jun 16
Visualizzazioni: 354